I have a deep fascination for the field of numerical optimization. I have worked on both
convex and non-convex optimization problems. Each requires very different approaches that
depends on the assumptions made about the objective function and the computational complexity
of that function.
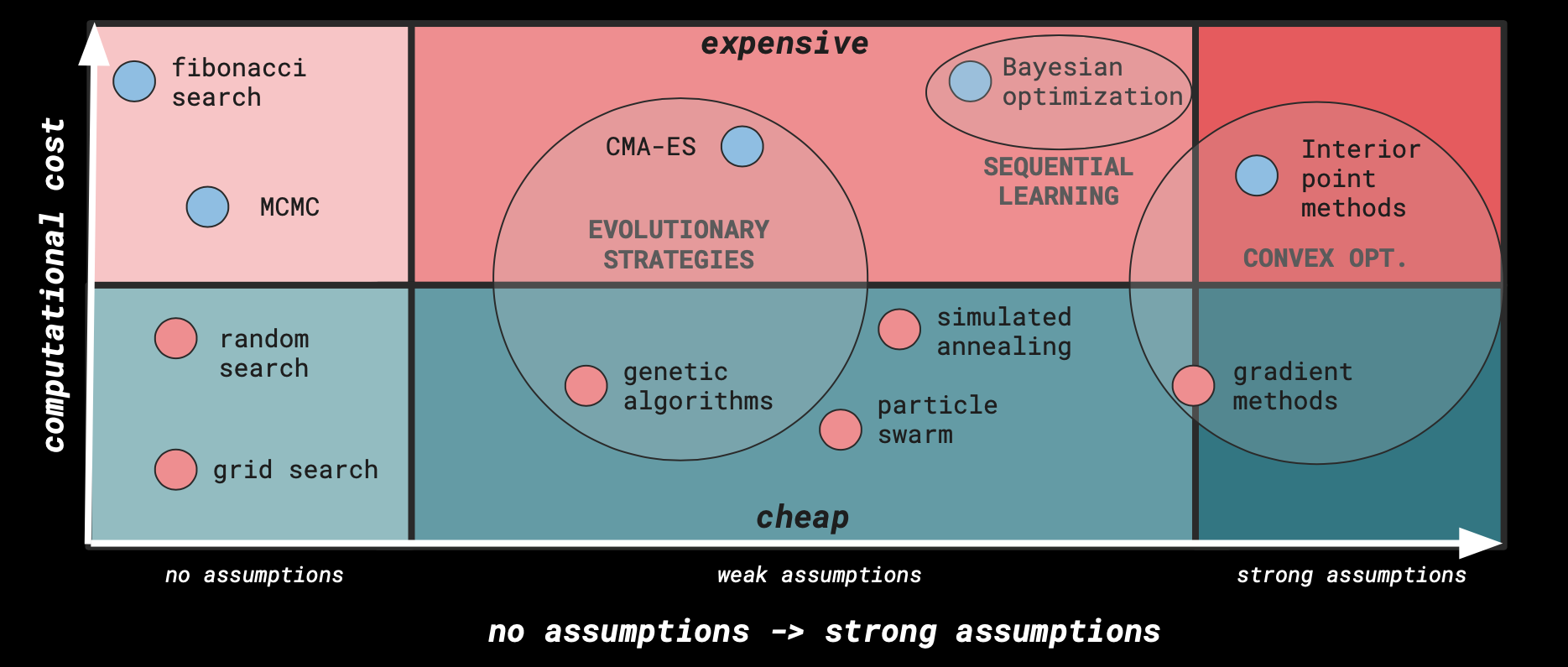
Optimization space.
Example
Visualizing multi-dimensional optimization problems is impossible, however simulating the
convergence of the algorithms in 3D can done. The simulation below shows the convergence of
a genetic algorithm to the global minimum of the Styblinski–Tang function (a non-convex
function where n=3).
Genetic alogrithm converging on global minimum.